Table des matières
système: H(p)=N(p)/D(p), N(p)=0.3, D(p)=p+1.1; Régulateur Kp =5; Ti=0.05; Td=10 yref=2 e(t) perturbation p(t)=0.1 e(t-5) paramètres de simulation t0=0s , tf=10 s
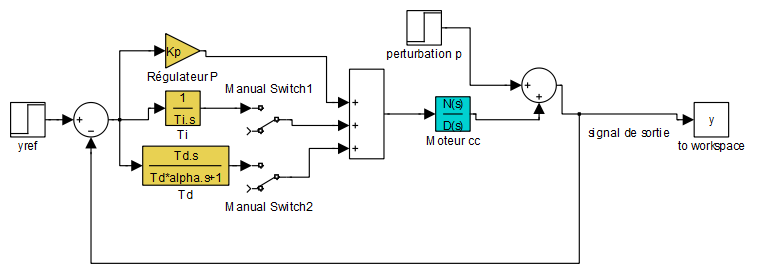
1 - Effet de l'action proportionnelle Kp.
Ouvrir les deux interrupteurs 1 et 2 faire varier k , visualisez le signal de sortie ainsi que le signal de commande. Conclure.
2- Effet de l'action intégrale Ti.
Fermer l'interrupteur 1, Kp=5 afin de voir l'effet de l'action intégrale, faire varier Ti et visualiser le signal de sortie y ainsi que le signal de commande u que se passe-til lorsqu'on essaye de réduire le dépassement?
3- Effet de l'action dérivée.
Fermer l'interrupteur 2; Kp=5, Ti=0.05 Essayer de réduire le dépassement en agissant sur Td, que constatez_vous?
Materiel utilisé.
1- Maquette asservissement de vitesse 2- Profy Cassy 3- Sensor Cassy 4- Pc + Logiciel Cassy Lab 5- Multimètre
Choisir les meilleurs paramètres Kp, Ti et Td à appliquer au régulateur PID. Faire le montage necessaire à l'asservissement de vitesse avec un régulateur PID Mesurer les signaux de sortie, de référence et de commande en montrant : - l'influence du changement de consigne - l'influence de la perturbation (augmenter ou diminuer la charge) Vérifier les résultats de simulation